最优化理论与方法-无约束优化
无约束优化
-
无约束优化问题
- 无约束优化问题是指在没有任何限制条件下,最小化一个依赖于实变量的目标函数:
其中 ()是一个实向量,函数 通常是光滑的(例如连续可微)。
- 无约束优化问题是指在没有任何限制条件下,最小化一个依赖于实变量的目标函数:
-
什么是一个解?
-
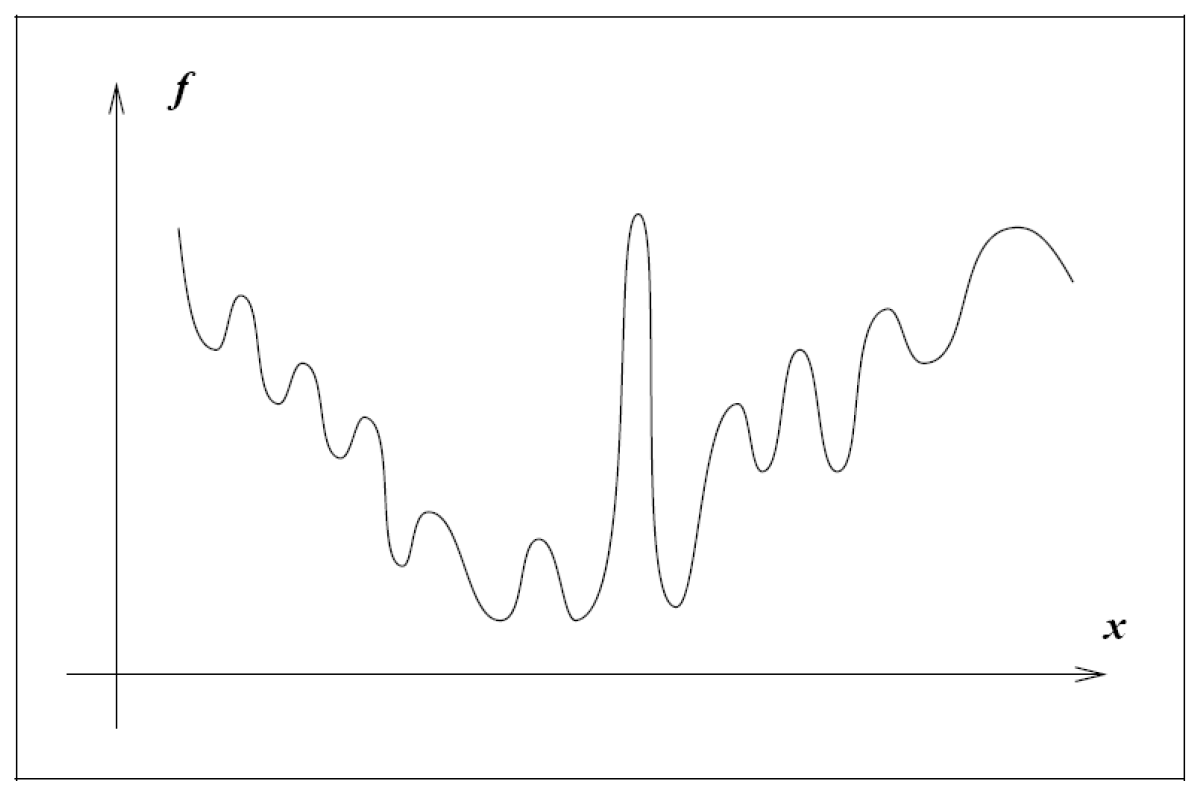
全局最小值点:
点 称为函数 的全局最小值点,如果 -
局部最小值点:
大多数优化算法只能找到局部最小值点,即在某个邻域内使目标函数值最小的点。
点 称为局部最小值点(或弱局部最小值点),如果存在 的一个邻域 ,使得 -
严格局部最小值点:
若存在邻域 ,使得则称 为严格局部最小值点。
-
-
识别一个局部最小
-
当目标函数 光滑时,有多种高效且实用的方法可用于识别局部极小值点。
-
特别地,若 二阶连续可微,则可通过考察以下两个量来判断某点 是否为局部极小值点(甚至严格局部极小值点):
- 梯度
- Hessian 矩阵
-
一阶必要条件
- 若 是函数 的局部极小值点,且 在 的某个开邻域内连续可微,则必有
此条件称为一阶必要条件(first-order necessary condition)。
- 若 ,则称 为函数 的驻点(或平稳点,stationary point)。
- 因此,任何局部极小值点都必须是驻点。
- 若 是函数 的局部极小值点,且 在 的某个开邻域内连续可微,则必有
-
二阶必要条件
- 若 是函数 的局部极小值点,且 Hessian 矩阵 在 的某个开邻域内连续,则必有:
- 梯度为零:,
- Hessian 矩阵半正定:。
这两个条件合称为二阶必要条件(second-order necessary conditions)。
- 若 是函数 的局部极小值点,且 Hessian 矩阵 在 的某个开邻域内连续,则必有:
-
二阶充分条件
- 假设 在点 的某个开邻域内连续,且满足
则 是函数 的严格局部极小值点。
此为二阶充分条件(second-order sufficient condition)。
-
针对凸函数的情况
- 若 是凸函数,则其任意局部极小值点 必为全局极小值点。
- 进一步,若 可微,则任意驻点(即满足 的点) 都是 的全局极小值点。
-
-
算法总览
对于一般的非线性最优化问题,最典型和常见的求解方法是迭代型数值方法。根据迭代过程中下一迭代点的生成方式,这类方法可分为随机搜索型方法和确定型方法。-
随机搜索型方法是一类仿生智能优化算法,主要依赖目标函数值信息,不依赖梯度或解析结构。
它适用于组合优化问题以及规模较小的连续优化问题。
常见方法包括:遗传算法、模拟退火算法、蚁群优化、神经网络方法等。 -
确定型方法根据所利用函数信息的程度,进一步分为:
- 直接搜索法(又称模式搜索法)
- 梯度型方法
-
直接搜索法通过观察目标函数值的变化规律来探测下降方向,并沿该方向寻找更优解。
它不需要计算梯度,适用于以下情形:- 变量维数较低,
- 约束结构简单,
- 目标函数形式复杂或不可导,导致梯度难以获取或计算成本高。
典型算法包括:坐标轮换法、Hooke-Jeeves 方法、Powell 共轭方向法等。
-
-
两种策略
对于梯度型数值方法(Gradient-based),一般通过两种策略,来
由当前迭代点产生下一选代点:线搜索策略和 信赖域策略。- 线搜索
- 在线搜索策略(line search)中,算法首先选择一个搜索方向 ,然后从当前迭代点 出发,沿该方向寻找一个函数值更低的新迭代点。
- 沿方向 移动的步长 通常通过近似求解如下一维优化问题来确定:
- 虽然精确求解该一维问题能最大程度地利用方向 的下降潜力,但精确线搜索计算代价高且通常不必要。因此,实际算法多采用满足一定条件(如 Wolfe 条件)的非精确线搜索。
- 信赖域
- 在信赖域策略(trust region method)中,算法利用当前已知的关于目标函数 的信息,构造一个模型函数 ,使其在当前迭代点 附近的行为与真实的 相似。
- 然而,当 远离 时,模型 可能不再是对 的良好近似。
- 因此,该策略将对模型函数的最小化限制在 周围的一个信赖域内,即求解如下子问题:
其中 是当前信赖域的半径,用于控制搜索范围。
- 模型函数 通常取为二次函数,形式如下:
其中:
- ,
- 是目标函数在 处的梯度,
- 是 Hessian 矩阵 或其某种近似(如拟牛顿法中的近似)。
- 线搜索VS信赖域
-
线搜索(Line Search)与信赖域(Trust Region)方法的核心区别在于确定方向与步长的顺序不同。
-
线搜索方法:
- 首先选定一个搜索方向 ;
- 然后在该方向上确定一个合适的步长 ,使得新点 能有效降低目标函数值。
-
信赖域方法:
- 首先设定一个最大移动距离,即信赖域半径 ;
- 然后在球形区域 内同时选择方向和步长(即向量 ),以在该约束下尽可能优化模型函数,从而获得最佳改进。
-
- 线搜索
-
线搜索——搜索方向
- 线搜索算法要求搜索方向 是一个下降方向(descent direction),即满足
- 这一条件保证了:存在某个 ,使得对所有 ,有
即沿 走“足够小”的一步,函数值必定下降。
-
一旦确定了下降方向,下一步是通过线搜索确定合适的步长 。
通常,这类算法生成的迭代点列 对应的目标函数值 是单调递减的,因此线搜索方法也被称为下降算法。 -
在影响算法效率的因素中,搜索方向的选择比步长的精确性更为关键。一个良好的方向往往比精细调整步长更能加速收敛。
-
搜索方向包括:
- 最速下降方向:
- 牛顿方向:
- 拟牛顿方向:,其中 是 Hessian 矩阵的近似
-
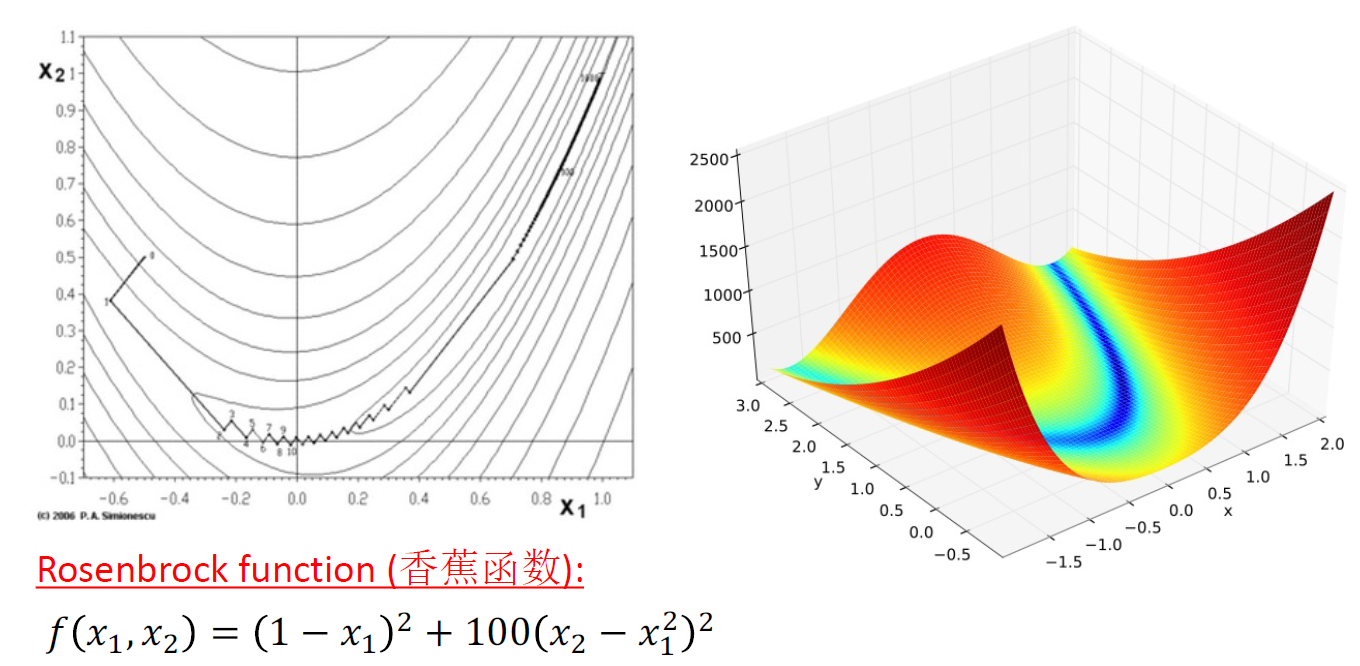
最速下降方向
-
最速下降方向(steepest descent direction)是指在当前点 处,使目标函数 下降最快的方向。
-
考虑一阶泰勒展开:
要使函数值在单位步长下下降最多,应最小化方向导数 ,即求解:
- 该问题的解为:
即负梯度方向是单位长度下的最速下降方向。
- 因此,最速下降法(又称梯度法或梯度下降法)采用搜索方向:
- 最速下降方向的优点是仅需计算梯度 $\nabla f_k$,无需二阶导数信息。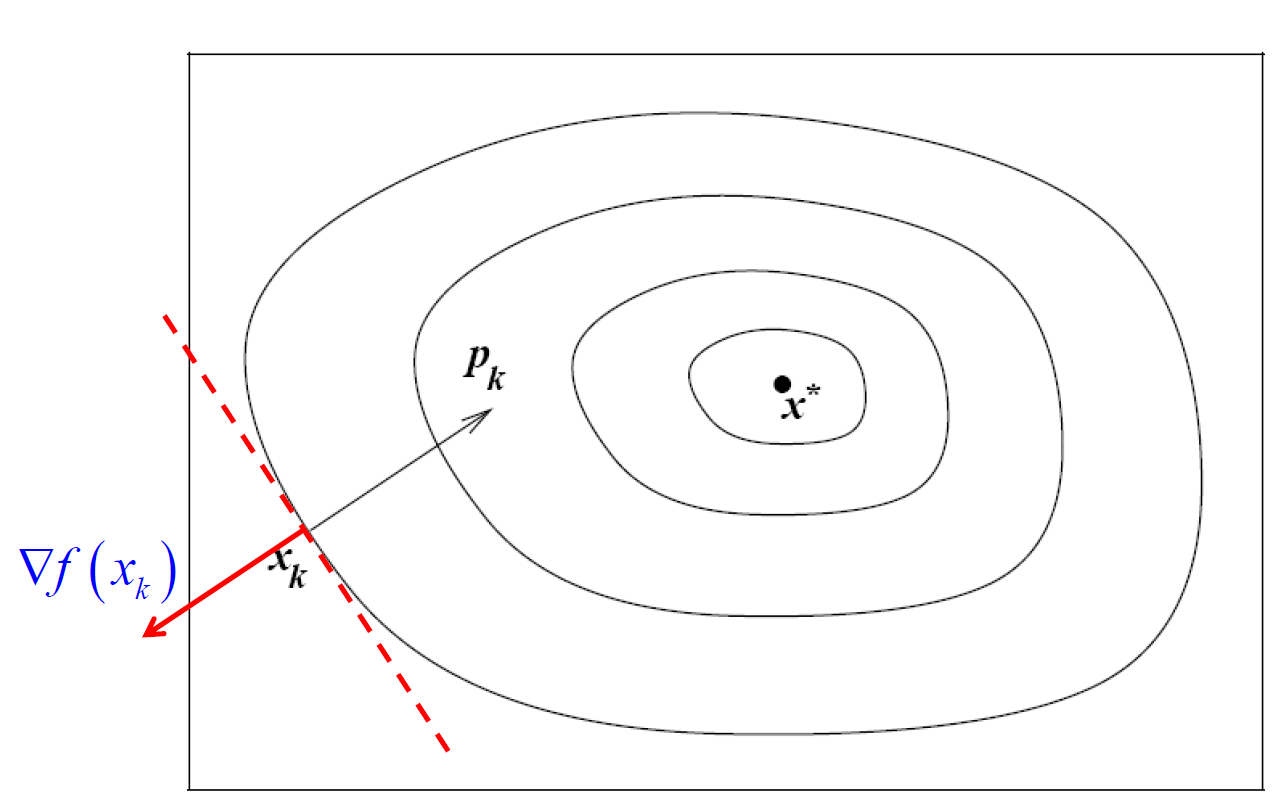
- 但在困难问题上,其收敛速度可能极其缓慢。
-